
注:完整代码在 https://github.com/GreenZhu233/quadrotor-circle-formation.git
实现思路
- 模型准备:使用gazebo官方的四旋翼无人机模型
- 控制思路:在无人机模型中添加
gazebo_ros_force和gazebo_ros_p3d插件。通过gazebo_ros_p3d读取无人机的位姿、速度、角速度信息,利用gazebo_ros_force向无人机传递力和力矩信息,以此来实现闭环控制。 - 编队算法来自论文: Wang, Xie - 2017 - Limit-cycle-based decoupled design of circle formation control with collision avoidance for anonymous agents in a pla
创建功能包
在工作空间的 /src 目录下使用 ROS2 指令 ros2 pkg create quadrotor_formation --build-type ament_python --dependencies rclpy ,创建一个由python编写的功能包。
无人机模型描述文件
在 Gazebo 默认模型路径中找到 /quadrotor 文件夹,可以看到内部存放一个文件夹和几个文件,重点关注 model.sdf 文件和 /meshes 文件夹。其中 model.sdf 描述的是四旋翼无人机的质量(mass)、惯量矩阵(inertia)、碰撞信息(collision)以及视觉信息(visual)。由于该无人机模型只是一个简单的刚体,因此 sdf 文件中的 link 标签只有一个,没有出现 joint 标签。此外,collision 与 vision 这两个标签共同引用了 /meshes 文件夹下的 quadrotor_base.dae,这个文件存储着整个四旋翼无人机的建模。
model.sdf
1 |
|
为了给模型添加 gazebo 插件,在其自带的的描述文件 model.sdf 中修改并不妥。为此,在功能包里添加一个名为 /urdf 的文件夹,在其中新建一个xacro文件:quadrotor.xacro ,将 model.sdf 的内容复制到 quadrotor.xacro 中。但是为了保持与 ROS2 的兼容性,需要在文档中作部分修改:
1 |
|
其中的 mesh 路径 model://quadrotor/meshes/quadrotor_base.dae 无需修改,因为 gazebo 识别到前缀 model://quadrotor 时,会自动在其环境变量 $GAZEBO_MODEL_PATH 中寻找 /quadrotor 文件夹,从而读取到所需的无人机 mesh 文件。
接下来是添加两个插件的部分。在 quadrotor.xacro 的 <robot> 中添加一个 <gazebo> 标签,填入两个插件的信息:
1 | <robot> |
由于编队的无人机是多个实体,它们所对应的 ROS2 节点不能共用一个名字,因此在 xacro 中添加一个参数 namespace,为每一无人机设定一个名字空间以进行区分,这样与之相关的话题都会带上名字空间作为前缀。xacro 的特性允许在外部调用该文件时对参数进行赋值。remapping 用来定义插件发布或订阅的话题名称。力与力矩话题称为 gazebo_ros_force,里程计话题称为 odom。frame_name 标签决定了传递的信息采用的参考坐标系,这里都采用 world 世界坐标系,能够为后续的计算提供便利性。
无人机起飞和编队的控制代码
在功能包的 /quadrotor_formation 文件夹下创建文件 circle_formation.py,其中包含一个总控节点,通过 ROS2 的话题机制订阅所有无人机的位姿速度(或称为里程计 Odometry)信息(由 gazebo_ros_p3d 插件提供),同时向所有无人机发布力和力矩信息(由 gazebo_ros_force 插件监听);得到动力学输入后,gazebo再对所有无人机的运动状态进行仿真计算,从而实现对所有无人机起飞和编队动作的闭环控制。
多线程订阅里程计话题
由于控制节点中存储的每个无人机的位姿与速度信息需要不断更新(从 gazebo 中获得),因此考虑为 odom 的订阅者放在一个线程中循环执行。
首先为控制节点创建一个回调组,然后为每个无人机创建里程计订阅者,并将所有订阅者放入回调组中,最后创建一个多线程执行器,用以循环执行该回调组。
1 | from rclpy.node import Node |
其中 quad.odom_callback 是处理订阅信息的方法,用于将接收的里程计信息存储到无人机的属性中。
起飞阶段
令生成的无人机平稳起飞到达指定高度是进行空中编队的前提。
简单起见,这里采用两段抛物线过渡的方式进行控制,如图所示。假设一架无人机需要在 $\left[0,t _f \right]$ 的时间内,高度从 $h _0$ 变化到 $h _f$。在 $\left[0,\frac{t _f}{2}\right]$ 时间内,它的加速度是 $\frac{4(h _f-h _0)}{t _f^2}$;在 $\left[\frac{t _f}{2}, t _f\right]$ 时间内,它的加速度是 $-\frac{4(h _f-h _0)}{t _f^2}$。将目标加速度与无人机的质量相乘,再补充克服重力,就能够得出起飞阶段需要加在每一个无人机身上的力了。
姿态保持
在无人机起飞过程中,由于失去了地面的支撑力,尽管主动力施加在质心上,无人机也可能因扰动产生期望之外的角速度,因此这里采用一个PD控制器实现对无人机姿态的控制。
将无人机当前的姿态四元数记为 $Q$,期望姿态的四元数记为 $Q _0$,可以定义误差四元数为 $Q _\epsilon=Q _0 \circ Q^{-1}$。PD控制器的比例部分与误差四元数有关,导数部分与角速度有关,公式如下:
$$
\vec{M}=k _p\vec{\epsilon} - k _d\vec{\omega}
$$
其中 $\vec{M}$ 是控制力矩在世界坐标系的分量,$\vec{\epsilon}$ 是误差四元数 $Q _\epsilon$ 虚部对应的三维向量,$\vec\omega$ 是无人机当前的角速度在世界坐标系的分量,$k _p$ 与 $k _d$ 是两个正常数对角矩阵。只要通过合理设置参数值,就能得到较为不错的控制效果。
在起飞阶段,每个无人机只需要保持初始姿态,将目标四元数设为 $1$,利用PD控制器向无人机输入恰当的力矩,就能够保证每个无人机都不会在空中出现自转的现象。
1 | import numpy as np |
这里选择把 $k _p$ 和 $k _d$ 都设成了惯量矩阵的整数倍。
因为惯量矩阵和这两个参数都是对角阵,在代码中简化为1*3向量,所以第8行的乘法运算用星号表示。
编队算法
在所有无人机起飞到制定高度后,登场的就是环形编队算法了。算法的理论推导和可靠性证明参考论文 Wang, Xie - 2017 - Limit-cycle-based decoupled design of circle formation control with collision avoidance for anonymous agents in a pla。
论文中采用分布式控制方法,对所有无人机逆时针排序后,每个无人机只需要实时更新三个向量信息——无人机与圆心和无人机与相邻两无人机之间的向量,就能够计算出自身此刻应该以怎样的速度运动。当所有无人机都采用相同的算法,就能够保证最终无人机按预定的圆心、半径、角距离实现环形编队,并绕圆心同步公转。
根据这三个向量信息,可以计算出与之相关的两个角距离 $\hat\alpha _{i^-}$ 和 $\hat\alpha _i$。
$$\begin{align*}
\hat\alpha _{i^-} =\arctan \frac{\left[ (\bar{p} _i-\hat{p} _{i^-}) \times \bar{p} _i\right] \cdot \vec{n}}{\left\|\bar{p} _i \cdot (\bar{p} _i-\hat{p} _{i^-})\right\|} \\
\hat\alpha _i =\arctan \frac{\left[\bar{p} _i \times (\bar{p} _i+\hat{p} _{i})\right] \cdot \vec{n}}{\left\|\bar{p} _i \cdot (\bar{p} _i+\hat{p} _{i})\right\|}
\end{align*}
$$
代码中的反正切使用 atan2 函数,得到的角度值域为 $\left[-\pi, \pi \right]$。
当编队完成时,这两个角距离将与目标值 $d _{i^-}$ 和 $d _i$ 相等。
控制算法如下:
$$
u _i(t) = \lambda \begin{bmatrix}
\gamma(r^2-\left \|\bar{p} _i(t) \right \|^2 ) &-1 \\
1 &\gamma(r^2-\left \|\bar{p} _i(t) \right \|^2 )
\end{bmatrix} \bar{p} _i(t) \left \{c _1+\frac{c _2}{2\pi}\left[\frac{d _{i^-}}{d _i+d _{i^-}}\hat\alpha _i(t)-\frac{d _i}{d _i+d _{i^-}}\hat\alpha _{i^-}(t)\right]\right \}
$$
其中,被控量 $u _i(t)$ 是无人机$i$ 在 t 时刻的速度(x和y方向),$r$ 是环形编队的半径, $d = \begin{bmatrix}d _1 &d _2 &\cdots &d _N\end{bmatrix}$ 是目标角距离,满足 $\Sigma _{i=1}^Nd _i=2\pi$。$\lambda,\gamma,c _1,c _2$ 是四个正常数,需要满足 $c _1 \ge c _2$。
1 | def circle_formation_control(radius, p_bar, p_hat, p_hat_minus, d, d_minus): |
返回值 u 代表无人机所需的速度,再通过PID控制算法就能得出使无人机达到此速度需要的加速度值,从而给出力的信息。
launch文件
使用 python 编写 ROS2 的 launch 文件,可具有更高的灵活性。在功能包目录下新建 /launch 文件夹,并在内部创建 circle.launch.py 文件,将需要运行的进程或启动的节点写在函数 generate_launch_description 内。
启动 Gazebo
1 | gazebo = ExecuteProcess( |
启动 Gazebo 时,调用 gazebo_ros_init 插件初始化 Gazebo 和 ROS2 环境,使用 gazebo_ros_factory 插件的服务来动态生成模型。
生成无人机模型
前文提到,在无人机的描述文件 quadrotor.xacro 中定义了一个参数 namespace,用来区分不同的无人机,对该参数的赋值就是在此处进行。首先使用 xacro 包的 process_file 函数将 xacro 文件翻译成 xml 文件,同时为参数 namespace 赋值,这样每个无人机就拥有了包含自己名字空间的描述文件。接着,启动 robot_state_publisher 节点,将每个无人机的描述文件(xml 格式的字符串)实时发布出来。然后启动 spawn_entity 节点,在 Gazebo 中生成所需的无人机模型,让每个无人机订阅自己名字空间下的 /robot_description 话题,获得所需的 xml 信息。这样,就能够看到多个无人机模型在 Gazebo 仿真环境中出现了。
1 | for i in range(num_of_quadrotors): |
启动控制代码
最后,就是启动自己编写的 python 节点,即控制所有无人机起飞和编队的节点。节点名称 circle_formation_node 是在 setup.py 文件中定义的。
1 | circle_formation_node = Node( |
收尾工作
在首次编译 python 功能包前,需要对 package.xml 和 setup.py 文件进行修改。
package.xml
在编写无人机描述文件时,引入了两个插件,gazebo_ros_force 和 gazebo_ros_p3d,与它们通信使用到了两个 ROS2 话题,对应着两种特殊的消息格式,分别是 geometry_msgs 中的 Wrench 和 nav_msgs 中的 Odometry。因此,需要在 package.xml 中声明对 geometry_msgs 和 nav_msgs 的依赖,才能对功能包进行编译。
1 | <package> |
setup.py
在 setup.py 文件中需要作两处修改。第一是在 date_files 列表中添加两个元组,将源码中的 launch 文件和 urdf(xacro) 文件复制到编译后的 /install 目录下的对应位置。
1 | ('share/' + package_name + '/launch', glob('launch/*.launch.py')), |
第二是在 entry_points 中添加一个节点,将名为 circle_formation_node 的节点和 circle_formation.py 文件中的 main 函数建立联系。
1 | entry_points={ |
效果展示
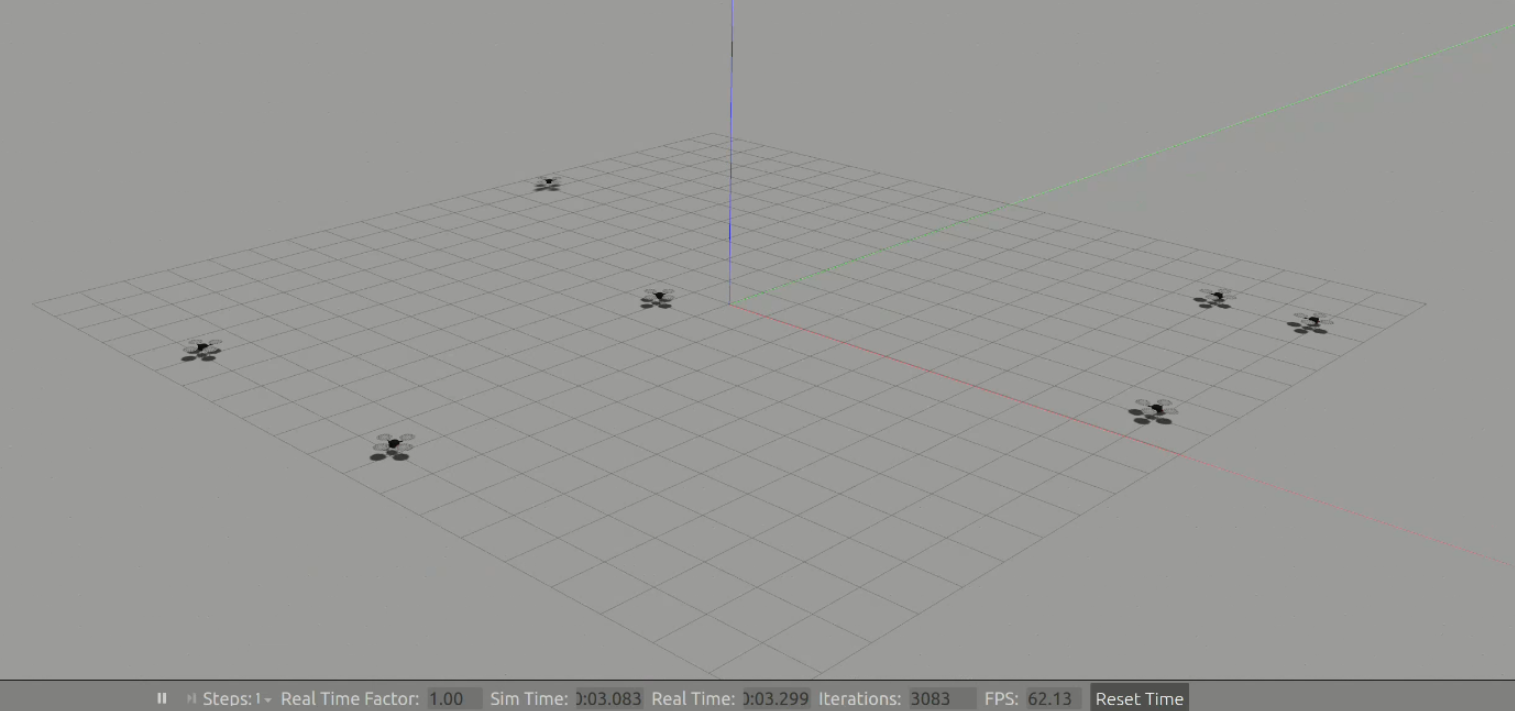
生成无人机模型
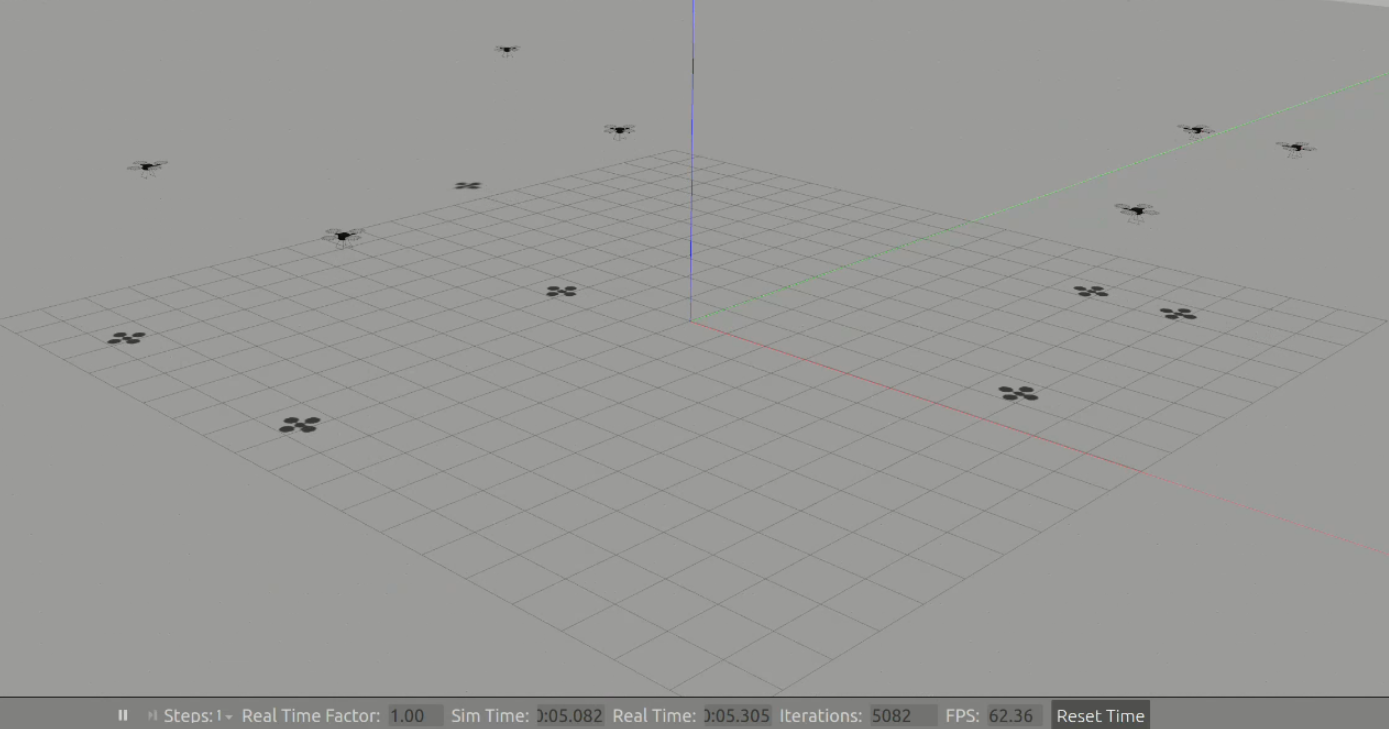
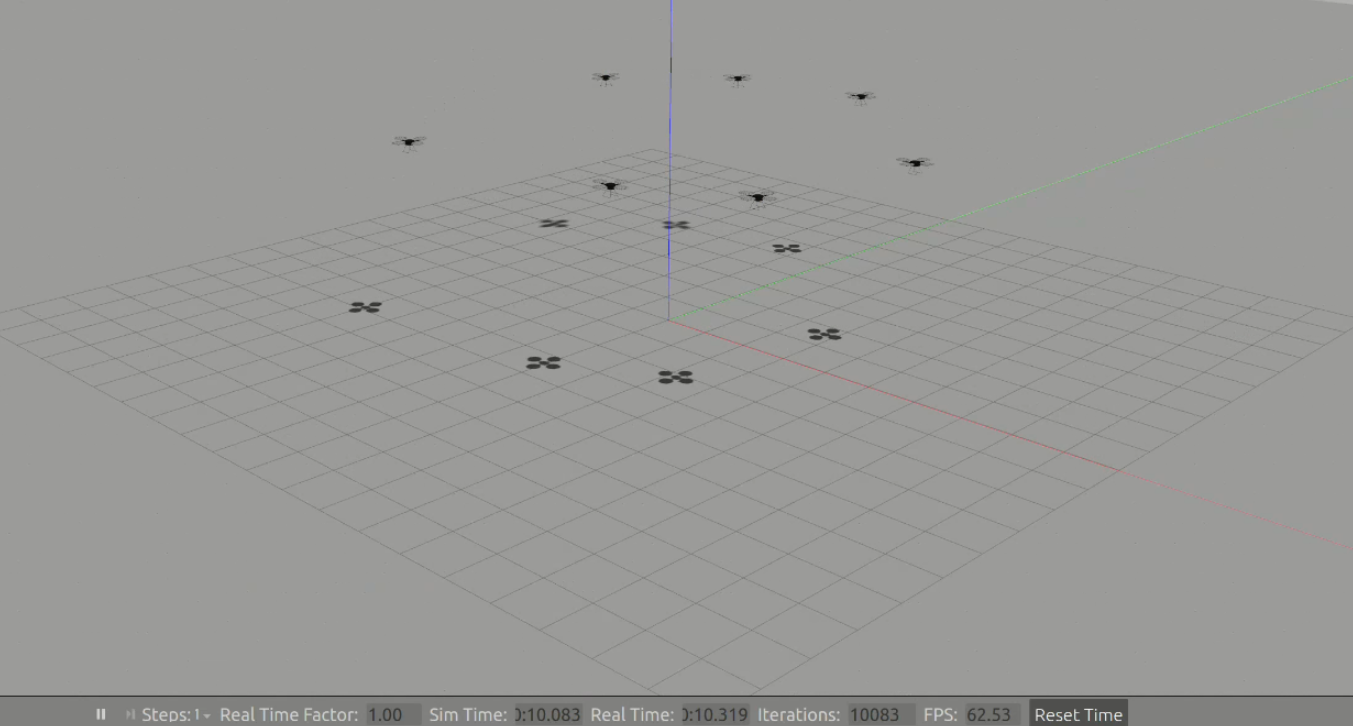
起飞到指定高度
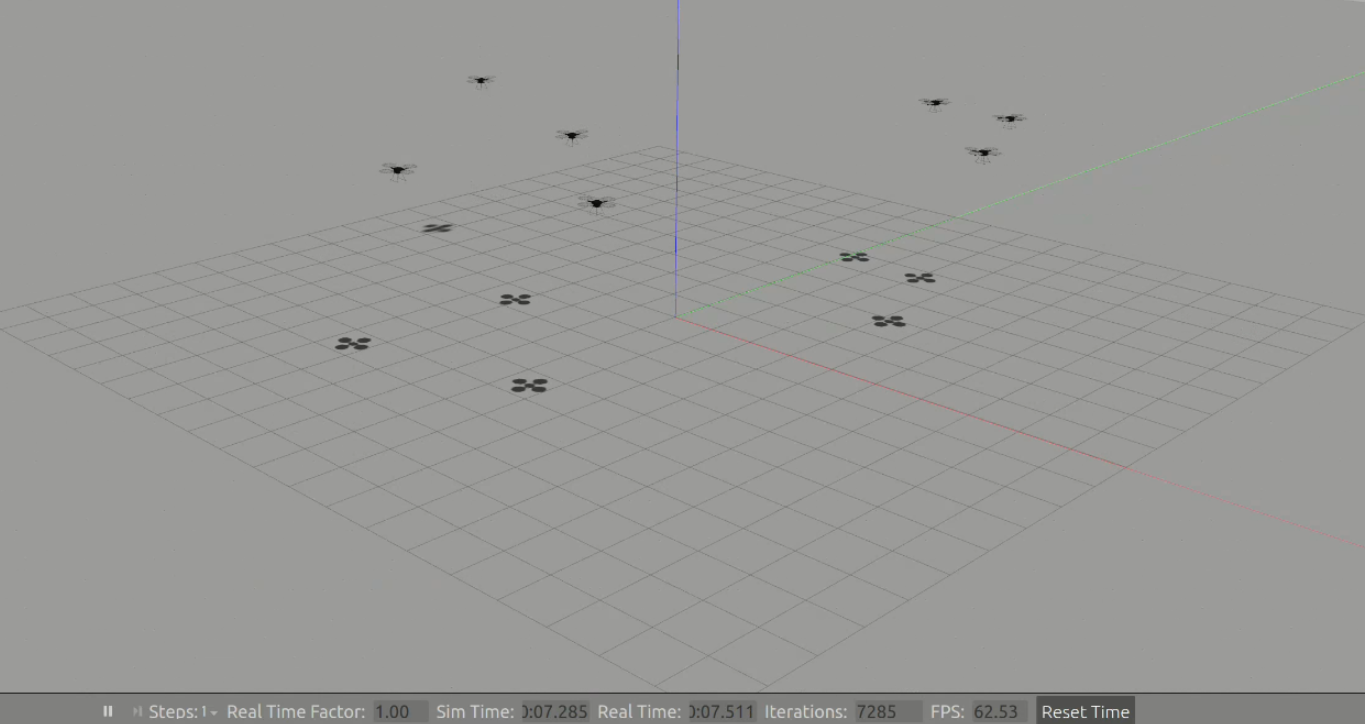
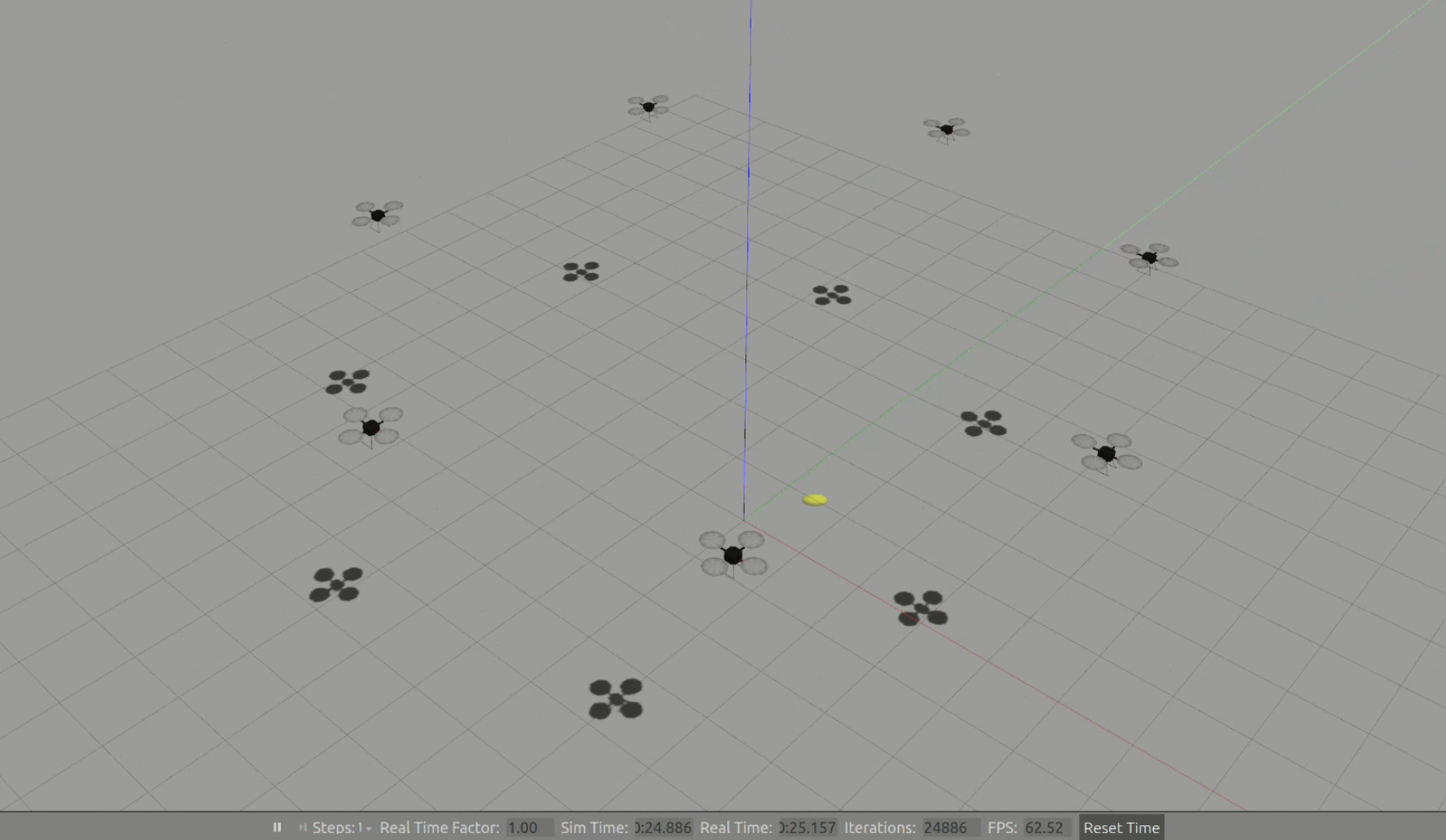
进行环形编队
编队完成
节点关系图
(只展示两架无人机相关的节点)
